数学的アプローチで新しい制御の手法を模索
システムの性質を根本から変革する方程式を求めて

情報科学研究科 システム情報科学専攻
システム創成情報学講座 システム基礎論研究室・教授
博士(工学)山下 裕
プロフィール
1986年北海道大学大学院工学研究科修士課程修了。88年同博士課程退学。同年北海道大学工学部助手、96年奈良先端科学技術大学院大学情報科学研究科助教授、2004年北海道大学大学院情報科学研究科教授、現在に至る。非線形制御理論などの研究に従事。IEEE、システム制御情報学会、電子情報通信学会,化学工学会などの会員。
モノの振る舞いをコントロールする数式
システム制御理論とはどのような学問でしょうか。
山下 制御工学は歴史のある学問で、ワットの蒸気機関から始まると言われるほどです。簡単に言うと、目的や用途に合わせてモノの振る舞いを変えることで、自動車や航空機もシステムの振る舞いを自在に変えることで制御しています。振る舞いを解析・数値化する理論的な側面と、実際に作動させる工学的な側面がありますが、それぞれ多様なアプローチ方法があり、非常に裾野の広い分野です。私たちの研究室では、その中でも方程式や関数などの数理モデルを用いた制御理論の研究を行っています。
制御理論には多くの方程式や関数が使われます。同じ方程式で表せるものは同じシステムと見なすのが基本的な考え方で、ひとつの方程式が複数の分野に適用されるケースも多いため、電気・機械・化学などの分野・業界を横断する俯瞰的な学問でもあります。
使われる方程式のほとんどは古典的なものであり、制御系の設計理論として成熟しているものも少なくありません。しかし、それを使って実際にモノを動かそうとすると理論通りにいかない場合が多く、使う目的やシチュエーションによって個別に調整が必要になってきます。なぜなら現実世界にはさまざまな物理的要素が存在し、それらがシステムに制約をかけてくるからです。
私たちの研究室では、こうした物理的条件にともなう制約を取り込んだ関数を合成したり、汎用性のある数理モデルをフレーム化することで、より少ない工程で制御設計できる手法の開発を目指しています。
If-thenルールなしの意思決定を可能にする制御則
具体的な例はありますか。

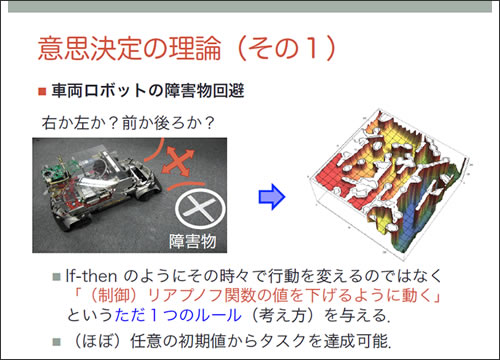
山下 車両ロボットの障害物回避を実例に説明しましょう。自動車の自動運転システムを設計する場合、If-thenルールベースの制御理論では、想定できるすべてのIfに対してそれに対応する命令を設定しなければなりません。現代の自動車業界では、対象をすべてコンピュータでシミュレーションし、それに対して既存の制御則を当てはめたりつなぎ合わせたりするのが一般的です。近年は、シミュレーション技術の発達により検証にかかる工程が短縮され、開発スピードが格段に向上していますが、膨大なシミュレーションを行うにはやはり多くの時間と労力を要します。それに対し、私たちのアプローチ方法は、前段階である制御則そのものを刷新する理論の構築を目指しています。
車両ロボットの研究では、障害物をどう避けるかという問題に対し、従来のIf-thenのようにその時々で行動を変えるのではなく、「(制御)リアプノフ関数(解説1/図1)の値を下げるように動く」というただひとつのルールを与えました。実験では、前後の障害物を切り返しで避けながら自律的にゴールに到達することに成功しています。
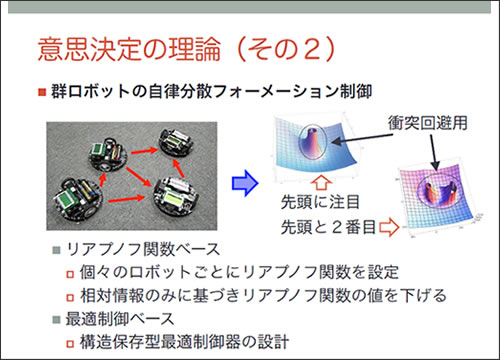
また、群ロボットの自律分散フォーメーション制御の研究でもリアプノフ関数をベースしています。個々のロボットごとにリアプノフ関数を設定し、近隣のロボットとの相対情報のみに基づき、衝突を回避するようなフォーメーションを達成します。(図2)
障害物に近づいたときにどう避けるかという問題は、意思決定問題でもあります。制御理論に意思決定問題を取り込み、If-thenルールではなく関数の形で表現する点に、私たちの研究の特異性があるといえるでしょう。
制御の価値を表現する方程式の生成
これらの研究は、今後の制御理論にどのようなインパクト与えるのでしょうか。
山下 今までの制御理論は、物理的な条件やシチュエーションの変化といった制約に対応しきれず、現実問題に適応できない部分が多々ありました。そこをクリアしようとすると意思決定問題に突き当たるのですが、今回の研究により関数というひとつのルールでロボットを自律的に動作させることが可能であると証明できました。
ある状況の中で起こり得る一つひとつの場面に対応するのではなく、制御の目的や周囲の環境も含めたシチュエーション全体を描き出す評価関数のようなものを作り、それにどのような性質を持たせればいいかを明らかにしたうえで、後はひとつの法則で動かしていく。そのような制御理論の発展型が提示できるのではないかと考えています。
研究室では、ロボット以外の非線形システムや偏微分方程式でモデル化されるシステムの制御などについても研究も行っており、多様な分野への適用を目指した理論の汎用化にも取り組んでいます。また、数学が難しくなりすぎると現場の技術者が扱いにくくなるという懸念もあるので、高度な数学的知識がなくても使えるようなフレームワークを作ることも重要なテーマですね。
開発現場の上流段階で、「こうやればうまくいくはずだ」という確証を、数学を使って得ることができる。その可能性と今後への期待を、多くの人に知ってほしいと思います。
解説
解説1:リアプノフ関数(Lyapunov function)
力学系や自励系を成す常微分方程式系における不動点(fixed point)の安定性を証明するために用いられる関数。ロシアの数学者であるアレクサンドル・リアプノフにちなんで命名された。本研究では、障害物と目標地点との位置関係から、空間に仮想的なポテンシャル場(制御リアプノフ関数)を構成し、これにより定まるただひとつのルール(フィードバック制御則)にしがたい、自律的に障害物を回避しつつ、前後に切り返しを行いながら目標地点に到達することができた。