宇宙工学からコンピュータサイエンスへ
インフラとして社会を支える賢いシステムを求めて

情報科学研究科 コンピュータサイエンス専攻
数理計算科学講座 知能情報学研究室・教授
博士(工学)杉本 雅則
プロフィール
1990年東京大学工学部航空学科(宇宙工学専修)卒業。1992年同大学院工学系研究科修士課程修了。1995年同大学院工学系研究科博士課程修了(博士:工学)。1995年4月より文部省大学共同利用機関学術情報センター (現国立情報学研究所)研究開発部助手。1999年8月より東京大学 情報基盤センター助教授。2002年4月より東京大学 大学院新領域創成科学研究科 基盤情報学専攻助教授となり、工学部 電子情報工学科を兼担。2008年4月より東京大学 大学院工学系研究科 電気系工学専攻准教授。2012年10月より北海道大学 大学院情報科学研究科 コンピュータサイエンス専攻教授となり、工学部 情報エレクトロニクス学科 コンピュータサイエンスコースを兼担。
人とコンピュータのインタラクションを実世界で検証
先生の研究テーマは非常に幅広いのですが、どのような特徴があるのですか。
杉本 子どもの頃から宇宙が好きで、将来は宇宙飛行士になりたいと思っていました。大学でも宇宙工学を学びましたが、大学院に進むとき、宇宙で役立つ優れたシステムを作るには優れた人工知能(AI)だと考え、そちらの研究を選びました。その後、文部省大学共同利用機関学術情報センター(現国立情報学研究所)を皮切りにさまざまな研究現場を経験し、多くの研究者と知り合うことができました。
こうした中から中心的な研究分野として取り組んできたのが「実世界メディア処理技術」です。現代はさまざまなメディアが使われていますが、画像、音声、言語だけでなくロボットもまた人とコミュニケーションするための一つのメディアと考えることができ、人間とロボットのインタフェースをどのように構築するかといったことも研究しています。
現在、私たちの研究室には大きく4つのテーマがあります。(1)ヒューマンコンピュータインタラクション (2)コンピュータビジョン・コンピュータアニメーション (3)測距・測位技術 (4)音響イメージングの4つで、さらにそれぞれの分野から派生した多くの研究プロジェクトがあります。詳しくはホームページ(http://aiwww.main.ist.hokudai.ac.jp/index.html)をご覧ください。2012年10月に本研究科に着任し、北大という新しい環境で新しいコラボレーションを生みだしていきたいと考えています。
具体的にはどのようなことをやっているのですか。
杉本 ヒューマンコンピュータインタラクションの研究では、プログラミングの知識や経験が乏しいユーザでもテーブルトップ環境で簡単にロボットプログラミングが行える新しい手法を開発しました。主に教育現場での利用を想定しています(解説1)。プログラミング言語を知らなくても、テーブルの上で実際にロボットを掴んで動かしたり、ロボットの周囲に表示されるアイコンを指で触れたりするなどの直感的な操作で、ロボットのプログラミングを行うことができます。これまで、タッチパネルやTUI(Tangible User Interface:実体を持つデバイスに物理的に触れることにより、操作を直感的に知覚できるインタフェース)などの初心者向けプログラミング手法はいくつか提案されていますが、単純な動きのプログラミングにとどまっています。一方、提案手法ではたとえば交通シミュレーションのような問題をテーブルトップ上に表現し、ロボットが周囲の環境に応じて行動を決めるといったプログラミングを簡単に行うことができます。物理的なロボットを活用したこのようなシミュレーションプラットフォームの提案はほとんど存在していません。
超音波通信を用いた位置認識システム
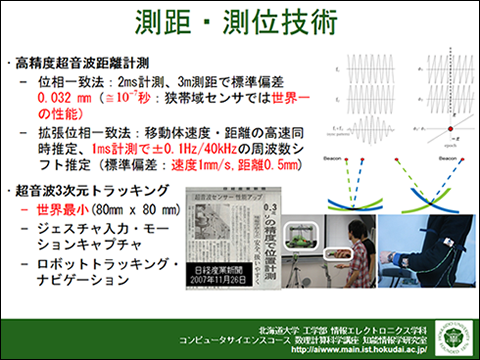
杉本 次にご紹介するのは、超音波を使った測距・測位の技術です(解説2)。位置情報と言えばGPSが有名ですが、屋内では電波を十分に利用できません。そこで国立情報学研究所の先生と協力して位相一致法という手法を考案するとともに、超音波の信号を利用した屋内の距離測定/位置認識を開発しました。市販の安価な狭帯域の超音波送受信機をベースにしたシステムでありながら、従来の超音波測定に比べ100倍以上精度が向上し、われわれが知る限り世界一の性能(3メートル測距で標準偏差0.032mm)を実現しています。
これを応用させたシステムとして超音波3次元トラッキング技術も開発しています(左図)。腕に装着した超音波送信機と数メートル離れた受信機を使って、人間の動きを3次元で計測します。カメラを使ったモーションキャプチャと似たような機能ですが、より軽量かつ小規模なシステムで計測できます。
これらの技術はどのような応用が期待されているのでしょうか。
杉本 位置情報を正確に取得できると、上位レベルのさまざまなアプリケーションの可能性が広がります。人とコンピュータとのインタラクションにもロボットのナビゲーションにも位置情報は重要ですが、確立した技術はまだなく、電波、赤外線、超音波、光など多方面からアプローチしている状態です。これに関しては、位相一致法とLEDを利用した位置認識システムにも注目しています。照明器具として使われているLEDを位置認識に流用すれば、センサなど特別な装置を取り付けなくても室内の人や物の動きを把握することができる。よりシンプルに、より安価な方法で精度の高い位置認識システムが作れれば、応用の範囲はさらに広がるでしょう。
「安心かつ安全」「人に優しい」を実現する賢い環境の設計
先生の研究が目指しているところはどのようなものですか。

杉本 高齢化社会を迎え、誰もが安心かつ安全に暮らせる社会環境を整備することは非常に重要です。位置認識システムなどはインフラとして社会に浸透させるべき技術と考えられ、私たちの研究が貢献できればと思っています。また、次世代を担う子どもたちの教育は国際的な競争力を支える根幹でもあるので、科学に興味を持ち論理的な思考を育む学習環境作りに情報技術を役立てることにも目を向けています。「人に対する技術」を念頭に置き、世の中の問題を創造的に解決できる知的な環境を、革新的な技術で作りたいというのが私の目標です。
また、技術を作るにあたっては、世界一の技術を目指しています。開発した技術を社会に応用し、その結果を次の理論や技術につなげていく。そのためにも、これから大学や大学院へ進学する若い人たちがこの世界に興味を持ち、活躍してくれることを期待しています。将来有望な若い人たちと一緒に私も勉強していきたいですね。
解説
解説1:テーブルトップ環境における新しいロボットプログラミング手法の提案
ロボットプログラミング支援環境「RoboTable2」では、既存のマルチタッチ入力認識手法であるDI(Diffused Illumination)、FTIR(Frustrated Total Internal Refrection)を用いることで、テーブル上の指の接触と、ロボットに取り付けたマーカを同時に認識。ロボットとRoboTable2はBluetoothを介して命令をやり取りする。ユーザがテーブル上でロボットに触れて動かすと、ロボット自身が認識した周囲の環境とロボットに与えられた動きからなるIf-Then ルールがプログラムブロックとして生成される。ユーザは,プログラムブロックを追加、削除、編集しつつロボットの行動を確認しながら、対話的にプログラミングを行うことができる。
解説2:高精度超音波距離計測
TOA(Time of Arrival)方式とAOA(Angle of Arrival)方式を組み合わせた手法によって位置を測定する。TOA方式では、送信機と受信機は無線通信によって時刻同期を行う。送信機は超音波信号を受信機へ送信するのと同時に、無線信号も送信。受信機はこの2つの信号を受信し、それらの受信時刻の差を超音波の伝播時間として計算する。超音波の伝播時間から、送信機と受信機の間の距離を計算することができる。また、超音波の受信時刻を高精度に検出するための手法として、位相一致法(Phase Accordance Method)と呼ばれる新しい手法を提案。従来の手法と異なり、位相一致法では複数の副搬送波からなる超音波信号の位相一致点を時刻基準点として送信し、受信側でそれを正確に検出することにより高精度の測距を可能にする。なお、ドップラーシフト量を実時間で推定するように拡張し、移動体の位置と速度の同時計測を可能にした拡張位相一致法と呼ばれる手法も開発済みである。