ロボット情報技術をベースにさまざまな分野へ広がる「軽労化技術」

情報科学研究科 システム情報科学専攻
ヒューマンセントリック工学研究室・准教授
博士(工学)田中 孝之
format_quote 農業や介護など、身体に負担をかける作業は疲労や故障の原因になっています。そうした作業負担を外部からパワーアシストする「軽労化技術」が注目を集めています。作業を完全に自動化・ロボット化するのではなく、人間がやったほう方がよいことはあくまで人間の手で行い、その際身体にかかる負担を適度に軽減する、それが「軽労化」のコンセプト。田中孝之准教授が長年取り組んできたロボット情報技術は、労働の現場から高齢化対策、宇宙開発まで幅広い分野に広がりつつあります。 format_quote
農作業の負担を軽減するスマートスーツの開発
ヒューマンセントリック工学研究室というのは珍しい名称ですね。
2014年に情報科学研究科の専攻再編に合わせて研究室名を変えました。それまでのシステム制御情報学研究室では、金子俊一教授の画像認識システムと私が専門とするロボット情報技術を2本の柱としており、それは今も変わっていません。また、画像認識もロボット情報技術も人間の行動計測や人間の活動を支援する技術の研究を一貫して行ってきました。近年は人間を中心とした技術開発が急激な盛り上がりを見せており、私たちの研究に対する期待も増していると考え、コンセプトがより明確になるよう研究室の名称を「ヒューマンセントリック(人間中心)工学」としました。
産学連携で開発されたスマートスーツとはどのようなものですか。
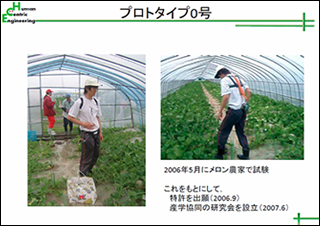
スマートスーツの開発は、異業種交流会で知り合った農業コンサルティング会社社長から「農業をやっている人たちは前屈みの姿勢になるため腰を痛める人が多い」という話を聞き、農作業の負担を軽減できる装具を開発できないかと考えたのが発端でした。1997年に開発した装着型増力装置(パワードスーツ)は、装備が重厚なため農作業には不向きだったので、簡単に着脱できるものを新たに考案しました。2006年にプロタイプ0号を制作(写真1)。弾性材(ゴムベルト)・センサ・モータを組合せ、中腰姿勢での長時間作業や腰の曲げ伸ばしの際の人の動きを計測し、ゴムの力を制御して動作をアシストする「セミアクティブアシスト機構」を搭載したスマートスーツを開発しました(写真2)。これは2009年7月に特許を取得しています。また、2006年から産学協同の「スマートスーツ研究会」を設立し、後の「軽労化研究会」につながっています。

情報ロボット技術によるスマートスーツの設計
スマートスーツ商品化の経緯についてお聞かせください。

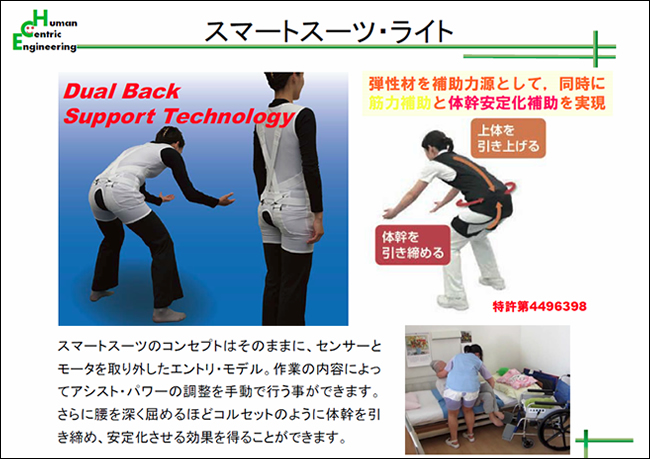
試作機を農業や酪農、介護、物流などさまざまな労働環境で実際に装着してもらいフィールド試験を行ったのですが、「経済性」「耐久性」「メンテナンス」などの部分で課題が多いことが分かってきました。スマートスーツにはセンサ、アクチュエータ、コントローラなどのロボット技術が使われていますが、じつはそれこそがユーザの利便性を害しているかもしれないと考えたのです。ではどうするか? 検討の末、ロボットの部分を取り外すという結論に達しました。大きな決断でしたが、スマートスーツのセンサとモータを取り外し、ゴム素材の弾性だけでアシストする仕組みに改良。これが「スマートスーツライト」(写真3)です。弾性材はゴムとテグスを織り合わせた特注の素材を用い、滑車の原理を利用してゴムの長さを変えることで引っ張る力を調整します。体幹を引き締める効果もあり、コルセットのように腰を安定させることができます。
ロボット研究に携わる者としては、結果的にロボット技術が使われない製品に仕上がったことに複雑な思いもありますが、技術というものは人々の役に立たなければ意味がありません。技術面での道筋はある程度見えたと判断したので、研究会のメンバーらによって設立した北大発ベンチャー企業の(株)スマートサポートに製造・販売を任せ、私たちは次のステージへ進むことにしました。
次のステージとは情報ロボット技術を使ったスマートスーツの設計です。軽労化が必要とされる分野は幅広く、農作業以外にも漁業や酪農、介護、建設、消防救急、物流センターや倉庫での荷物の積み卸しなど、さまざまな作業があります。しかも、作業の内容によって体の動かし方が少しずつ異なり、スマートスーツの効果が現れにくいものもあるのです。そこで、当研究室の得意分野である画像認識や3次元動作計測、モデリング技術などを活用し、それぞれの動作に適したスマートスーツの設計を開始。2009〜2010年度にはNEDO(独立行政法人新エネルギー・産業技術総合開発機構法)の福祉用具実用化開発推進事業に採択され、介護用スマートスーツの臨床試験を行いました。さらに特別養護老人ホームなどでの長期臨床試験の行い、(株)スマートサポートでの試験販売も実施しています。
負担を軽減しつつ「さりげないトレーニング」を促す軽労化技術
軽労化技術は今後どのような方向へ進むのでしょうか。

前述のようにパワーアシストツールを導入したいと考えている職場は数多くあり、どの作業にはどんなツールが適切かを事前診断し、それに合ったものを提供するためのノウハウや仕組みづくりが求められています。現在、産業医科大学と共同で、産業医が作業現場の状況に合ったパワーアシストツールの処方・提案ができるような仕組みづくりを研究しています。
また、パワーアシストツールで作業負担を軽減し過ぎると、かえって本人の筋力を低下させてしまうのではないかという懸念もあります。私たちはそうした面に考慮し、身体能力を落とさず、かつ疲労が軽減できる補助力はどの程度のものなのか検証する研究も始めています。目指しているのは、加齢とともに失われる体力(筋力)を維持・増強しつつ適切な負荷を与える「さりげないトレーニング」。超高齢化社会を迎えた今、お年寄りが日常の軽い作業くらいはこなせる体力を維持することができれば、いつまでも生きがいを持って、楽しく暮らせるでしょう。その足がかりとして、雪かき時の障害予防と負荷軽減のための防寒着「雪かきスーツ」を開発しました(リンク:http://keiroka.org/news/869/)。これはメディアにも取り上げられ、大きな反響を呼んでいます。
逆に、適度な運動負荷を与えて筋力を増強させるトレーニングツールとしても活用できると考え、JAXA(宇宙航空研究開発機構)の関連企業であるJAMSS(有人宇宙システム株式会社)と共同で有人宇宙飛行士のトレーニングスーツの開発にも取り組んでいます。
現在、軽労化研究会には農業、介護、建設土木、物流、旅行会社、電機メーカーなど多様な企業が参加しており、スマートスーツの適用・応用だけでなく、新たな軽労化技術の開発に関する共同研究が盛んに行われています。「軽労化」という考え方を広め、多くの方に興味を持ってもらえれば、さらに幅広い分野に展開できるのではないかと期待しています。