臓器・筋骨格の相同モデリング

表面形状だけでなく,身体の内側についても相同モデリングを行うことで,個人別モデル・代表モデル(いずれも臓器や筋骨格を含む)の生成や,個人別モデルの少数寸法からの復元を実現します.また,モーションキャプチャやモーションデータベースと連携することで,把握姿勢,着座姿勢,そして歩行動作など,製品や人工環境に対して多様な姿勢を生成できるようにします.
このために,医用画像(CT画像やMRI画像)に対して,全身の骨格モデルを相同フィッティングするための手法,そして医用画像から読影した骨格形状と軟部組織(臓器や筋骨格)の位置関係から,フィッティングした骨格モデルに対して,全身の軟部組織モデルを相同変形するための手法を研究します
体形のバリエーションを考慮した全身筋骨格モデルや,体形・姿勢のバリエーションを考慮した全身有限要素モデルが生成できるようになるため,筋活性解析から衝突解析まで,個人差を再現したデジタルヒューマンモデルの可能性を広げることができます.
人工環境に対する歩行リスクの評価
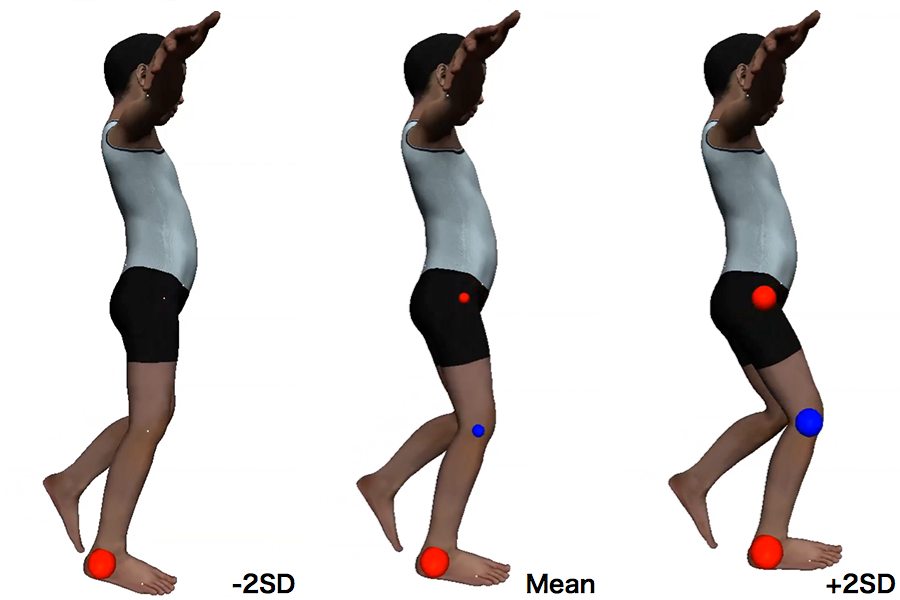
レンジセンサなどを用いて取得した人工環境の3次元デジタルデータ中で,歩行運動の生成,環境と身体とのインタラクションによる歩行変容の予測,そして歩行安定性の計算を行うことで,人工環境に対する歩行リスク(転倒リスクなど)分布を可視化できるようにします.また,このリスクを最小にできるような,最適人工環境をコンピュータ上で計算できるようにします.
このために,モーションキャプチャやモーションデータベースと連携することで,多様な歩行運動を生成するための手法,歩行運動中の環境と身体とのインタラクションに対して,神経レベルでのフィードバックを与えることで,歩行の変容を予測するための神経筋骨格モデル,そして重心のインクリネーション角度や,つま先クリアランスなど,歩行の安定性を評価するための手法を研究します.
これらを統合することで,任意の人工環境に対して歩行リスク分布を可視化すると共に,このリスクを最小化できるような人工環境の形状を計算するための最適化アルゴリズムを研究します.
製品モデルに対する把握性・操作性の評価
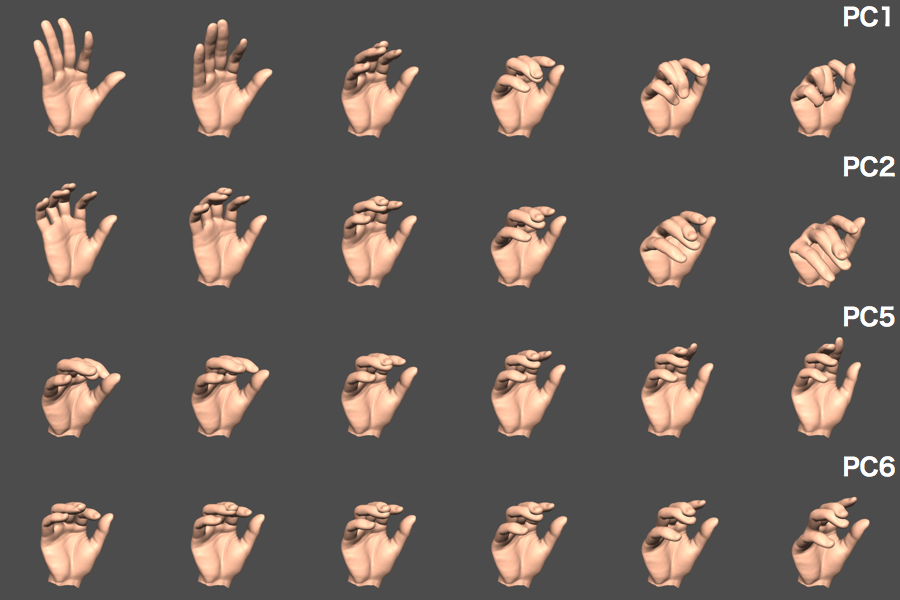
製品の3次元CADモデルに対して,把握姿勢の生成,そしてその際の筋活動や把握安定性の計算を行うことで,製品の把握性や操作性をコンピュータ上で評価できるようにします.また,この把握性・操作性を最大にできるような製品形状を,コンピュータ上で計算できるようにします.
このために,モーションキャプチャやモーションデータベースと連携することで,多様な把握姿勢を生成するための手法,そして筋活性や筋張力のような筋活動指標と,摩擦円錐の凸包や限界外力のような把握安定性指標を計算するための手法を研究します.
これらを統合することで,任意の製品形状に対して把握性・操作性を計算すると共に,これらを最大化できるような製品形状を計算するための最適化アルゴリズムを研究します.