
 HOME
HOME
 こちら
こちら

興味を持ったキーワードをクリックしてみてください
ロボットシステム
小型パワースーツの開発

農作業や介護の現場では,腰を屈め続けたり,重いものを持ち上げたりと腰や腕に大変な負担がかかります.そこで,体に身に付けるだけで筋力を補助して楽に作業ができるようになるスマートスーツをつくる研究を行っています.
. この研究を行っている研究室のホームページ
この研究を行っている研究室のホームページ
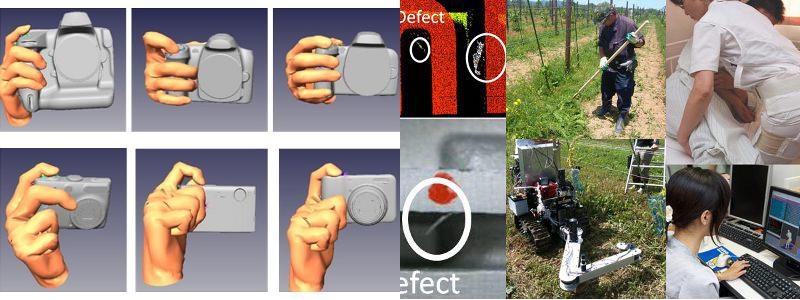
視覚フィードバック制御とロボットビジョン

ブドウ畑で雑草を刈ったり建物の中を歩き回るロボットには,視覚・触覚センサとその情報から物体を認識する能力が求められます.そのための画像認識技術と,画像情報を元に不整地を走行するナビゲーション技術を開発しています.
この研究を行っている研究室のホームページ
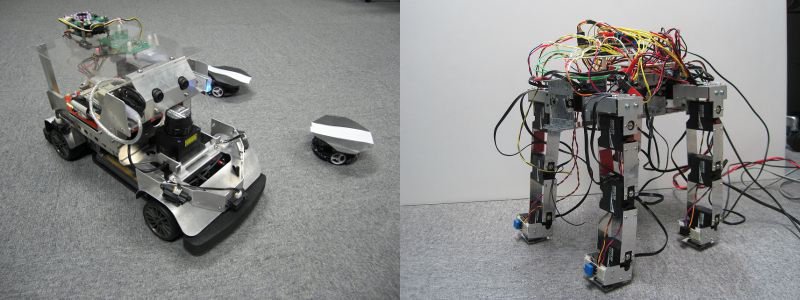
移動ロボット,人工衛星のための制御システム設計

宇宙ロボットの姿勢制御や車の車庫入れの操作を機械が自動で行うのは非常に難しい制御が必要です.それに必要な制御理論に関する研究を行っています.また,複数のロボットが隊列を組んで移動するときにどのような隊列にすると効率がよいのか?広大な作業場所にロボットを配置するときに,どのようにして分散させて配置させるのか? といった研究も行っています.
この研究を行っている研究室のホームページ
エネルギーシステム
メガソーラー太陽光発電所

稚内市に巨大な太陽光発電所(メガソーラー)があるのをご存知ですか.太陽光発電は日差しによって出力が変動するので,作った電気をそのまま送電線に載せると,電圧や周波数が変動して電力網が不安定になります.そこで太陽光発電の電力を安定化するための研究を行っています.
.この研究を行っている研究室のホームページ
高柔軟・高信頼電気エネルギー流通システム
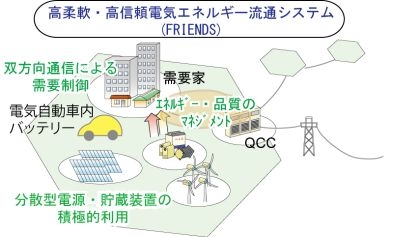
従来は電力会社だけが発電所で電力を作っていましたが,それ以外の会社でも電力を作って売ることができるようになりました.また,作った電力を貯めておくエネルギー貯蔵技術の開発や停電や電圧の変動を抑える様々な新しい技術が開発されています.これらの技術を融合させた近未来のエネルギー環境の実用化に向けた研究を行っています.
この研究を行っている研究室のホームページ
.
マイクロ水力発電
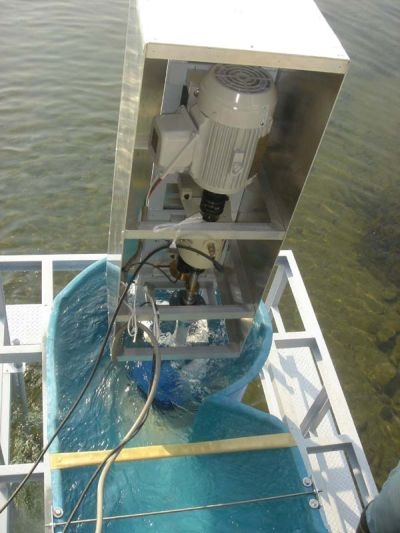
水力発電所というと巨大なダムを想像しますが,身近にある小さな小川や用水路でも電気を作れます.そのためのマイクロ水力発電と,そこで用いる高性能な制御回路の研究を行っています.
この研究を行っている研究室のホームページ
センシングシステム
無人飛行機(UAV)による環境モニタリング

火山噴火や原発事故現場のような人間が近づけないような環境でも無人の飛行機なら飛ばすことができて,上空から様々な情報を得ることができます.そのための小型の無人飛行機の開発を行っています.
この研究を行っている研究室のホームページ
人工衛星による植生解析
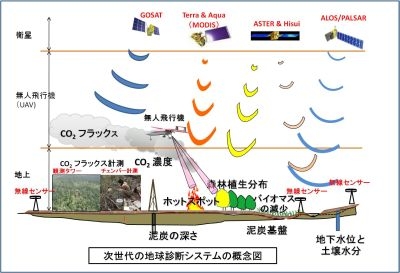
人工衛星には可視光の画像だけではなくマイクロ波センサーなどの様々な種類のセンサが搭載されています.それらの情報から,どのような種類の植物が生えているのかだとか,穀物の収穫量の予測も行うことができます.そのための解析技術の研究を行っています.さらには森林火災の延焼予測に関する研究も行っています.
この研究を行っている研究室のホームページ
マクロスケール現物融合型設計技術
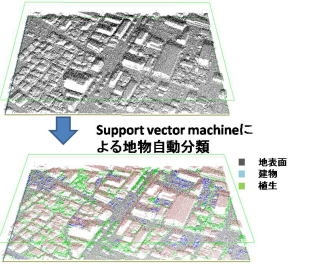 飛行機の上から地上にレーザーを当てて,地形の凹凸などのデータを収集することができます.これで得られた膨大なデータから,特定の物体を自動で見つけ出したり,街路樹や建物を除いて道路の形状だけを取り出したりする研究を行っています..
飛行機の上から地上にレーザーを当てて,地形の凹凸などのデータを収集することができます.これで得られた膨大なデータから,特定の物体を自動で見つけ出したり,街路樹や建物を除いて道路の形状だけを取り出したりする研究を行っています..
この研究を行っている研究室のホームページ
パワーシステム
次世代ハイブリッド自動車用レアアースフリーモータの開発
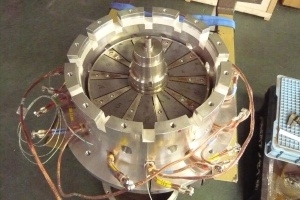 ハイブリット自動車や電気自動車が注目されていますが,その心臓部といえるのが小型で高出力なモーターです.このモーターには強力な磁石が必要で,レアアースとよばれる希少な元素が必要でした.そこで,レアアースを使わなくても従来と同じパワーを出せる次世代モーターの開発を行っています.
ハイブリット自動車や電気自動車が注目されていますが,その心臓部といえるのが小型で高出力なモーターです.このモーターには強力な磁石が必要で,レアアースとよばれる希少な元素が必要でした.そこで,レアアースを使わなくても従来と同じパワーを出せる次世代モーターの開発を行っています.
この研究を行っている研究室のホームページ
コントロールシステム
移動ロボット,人工衛星のための制御システム設計
宇宙ロボットの姿勢制御や車の車庫入れの操作を機械が自動で行うのは非常に難しい制御が必要です.それに必要な制御理論に関する研究を行っています.また,複数のロボットが隊列を組んで移動するときにどのような隊列にすると効率がよいのか?広大な作業場所にロボットを配置するときに,どのようにして分散させて配置させるのか? といった研究も行っています.
この研究を行っている研究室のホームページ
機械学習によるロボット制御
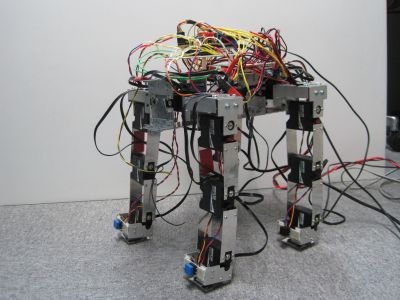
初めて自転車に乗るときや,難しいスポーツの技を体得するときは,何度も失敗しながら試行錯誤により正しい筋肉の動かし方を学びます.これと同じようにロボット自身に歩き方や段差の超え方などの行動を自律的に学習させる研究を行っています.
この研究を行っている研究室のホームページ
設計・生産システム
サイバーフィールドモデリング

実世界のさまざまな対象とその挙動をコンピュータの中で表現して,製品・設備の設計・生産・保守等を支援するためのサーバーフィールドの構築を目的としています.実世界と仮想世界の間の情報連携手法,動く物体の挙動をコンピュータの中で簡潔に取り扱うめの4次元形状モデリングなどの研究を行っています.
この研究を行っている研究室のホームページ
電子機器の最適化設計

モータなどの機器の設計では,与えられた仕様を満足して「最も性能が良い物」を作ることが求められます.そのために,コンピュータシミュレーションを使って,コンピュータの中で形状を様々に変化させて,その中でもっとも性能の良い形状を探し出します.この最適化設計に関する研究や,シミュレーションの高速化,高精度化を目指した様々な研究を行っています.
この研究を行っている研究室のホームページ
デジタルヒューマンモデルによる仮想エルゴノミック評価
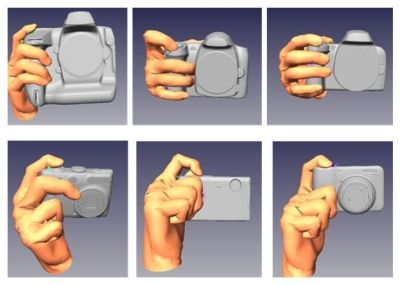
携帯とかデジカメが操作し易いかどうかは実際に手に持ってみないと分からないものですが,これをコンピューター上の仮想空間の中で,どのくらい「持ちやすいのか」,「操作しやすいのか」を計算してしまう研究を行っています.これにより何度も試作を繰り返さなくても,コンピュータ上で製品を設計することができて,開発のスピードアップ・コスト削減を実現できます.
この研究を行っている研究室のホームページ
フィールド情報学
フィールド情報学とは?

空間的と時間の広がり中に多様さと複雑さをもったもの-そうしたものをわたしたちはフィールド(Field)という言葉で表現しています.農耕地や森林,工場システム,電力システム,ロボットシステム,エレクトリックデバイスの電磁界など,一見すると全く違ったものが,フィールドという観点からは共通した性質が見えてきます.そのフィールドに対して,モデリング,アナリシス,シミュレーション,コントロール,モニタリングなどの先端的な情報技術を適用して,情報強化されたフィールドを構成する方法論を確立したい,それがフィールド情報学の目指すところです
.フィールド情報学のページに飛ぶ
ヒューマンサポートシステム
小型パワースーツの開発
農作業や介護の現場では,腰を屈め続けたり,重いものを持ち上げたりと腰や腕に大変な負担がかかります.そこで,体に身に付けるだけで筋力を補助して楽に作業ができるようになるスマートスーツをつくる研究を行っています.
.この研究を行っている研究室のホームページ
大規模災害被災者の救命救助活動を支援技術の開発

大地震や洪水などの広域災害が発生した場合,被災地での情報の収集と配信を速やかに行うことが,効果的な救助や安全な避難を行う上でとても大切です.そこで,災害情報収集用の情報気球InfoBalloon の開発を始めとして,木造家屋の倒壊する過程や倒壊後のがれきの構造をコンピュータシミュレーションによって調べる「がれき工学」の研究を行っています.
この研究を行っている研究室のホームページ


