様々な計測データの位置合わせ(レジストレーション)
背景とねらい
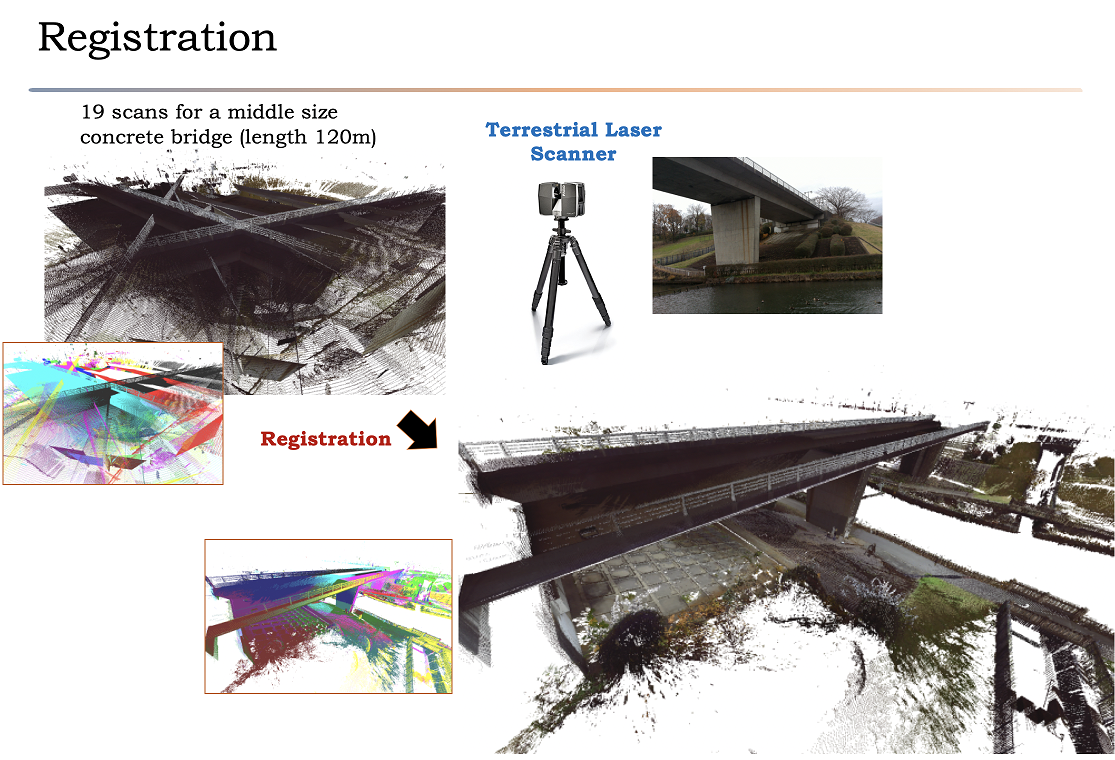
レーザや画像を用いた3次元計測では,光の反射を計測に利用しているため,計測システムから可視な部分しか一度に計測できません.そのため,対象物や対象環境全体の3次元計測データを得るためには,複数箇所,複数姿勢での計測が必要になります.各計測で得られる点群やメッシュの基準の位置や姿勢は計測器を基準に決定されているため,単純にデータを重ね合わせた計測データは計測対象物や環境を正確に表していません(下図1左上).そのため,複数回の3次元計測で得られた計測データを活用するためには,計測データ内の対応する部分を見つけ,それらの位置を合わせる位置合わせ(レジストレーション)処理が必要不可欠です(下図1右下).
また,現在,ハンディ型スキャナ,固定式レーザスキャナ,車載レーザスキャナ(移動計測,MMMS: モービルマッピングシステム),航空機LiDARなど,様々な計測システムが計測対象に合わせて選択的に利用可能です.各システムは得意不得意がありますので,対象とする環境や物体の完全な3次元計測データを得るためには,これらの計測システムを併用した補完的計測が必要不可欠になります.このような状況下では,異なる計測システムから得られる,質の異なる計測データを安定して位置合わせすることも望まれます.他にも,GPSやIMUなどを利用して位置姿勢を推定しながら3次元計測を行うシステムの計測データも,同じ箇所を計測すると計測誤差がのり,ずれが生じます.そのずれを効率よく安定して直すための位置合わせ技術も強く望まれます.
以上のような背景のもと,本研究では,様々な計測システムから得られた計測データを高速に自動位置合わせするためのアルゴリズムを開発しています.
手法概要
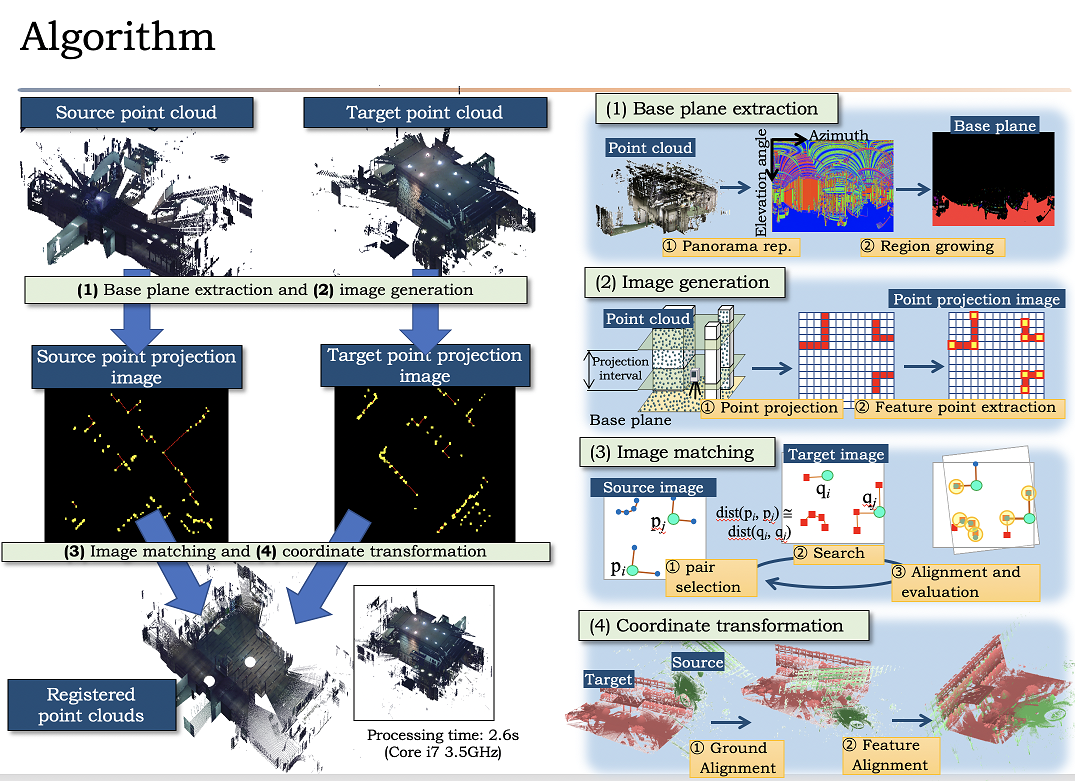
開発手法では,効率の良いレジストレーション処理を実現するために,計測データから単純な形状特徴を抽出し,計測データ間の対応検出(マッチング)に利用します.ある方法では,下図のように,水平面でスライスした計測データ内のコーナー点集合を利用します.市街地環境を対象とした手法では,ビルの鉛直エッジと地面平面の交点集合(2次元)を利用します.得られた2次元特徴点集合のマッチングには,HashとRANSACと呼ばれる方法を利用しています.Hashは対応する可能性のある2〜3点の特徴点を効率よく見つけるために利用しています.RANSACは,信頼できる位置合わせ結果を見つけるために利用しています.
効果
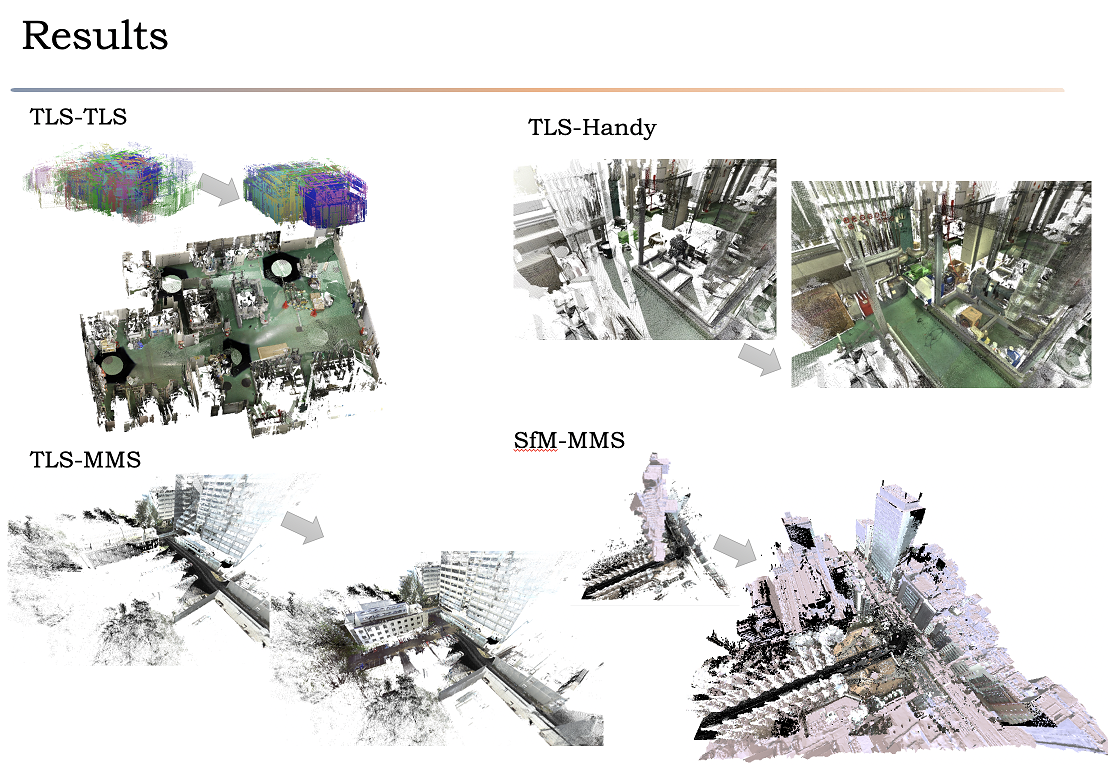
下図はいくつかの計測システムから得られた計測データのレジストレーション結果です.開発手法では,固定式レーザスキャナ(TLS)から得られた10点群を15秒程度で高速に位置合わせできることを確認しました.その他にも,TLSとハンディスキャナから得られた点群の位置合わせ,MMSから得られた点群と航空写真のSfM/MVSで得られたメッシュとのスケール調整を伴う位置合わせ,同一箇所を計測したMMS点群のズレ修正,TLSとMMSの点群の位置合わせなどを行えることを確認しました.本技術は将来ますます進む3次元計測技術の活用の一つの基盤となると期待しています.
関連論文など
- Taiki Sumi, Hiroaki Date, Satoshi Kanai, "MULTIPLE TLS POINT CLOUD REGISTRATION BASED ON POINT PROJECTION IMAGES", ISPRS Technical Commission II Symposium 2018/Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci., XLII-2, 1083-1090, Jun. 4th, 2018, Riva del Garda, Italy.
- Hiroaki Date, Takahito Yokoyama, Satoshi Kanai, Yoshiro Hada, Manabu Nakao, and Toshiya Sugawara: "Efficient Registration of Laser-Scanned Point Clouds of Bridges Using Linear Features", International Journal of Automation Technology, 12(3), 328-338 (2018)
- Reiji Yoshimura, Hiroaki Date, Satoshi Kanai, Ryohei Honma, Kazuo Oda and Tatsuya Ikeda, "Automatic registration of MLS point clouds and SfM meshes of urban area, Geo-spatial Information Science, 19(3), 171-181 (2016) (DOI: 10.1080/10095020.2016.1212517)
- H. Date, S. Takai, S. Kanai, R. Honma, K. Oda, and T. Ikeda, "Automatic Robust Registration of MLS Point Clouds of Urban Area", The 9th International Symposium on Mobile Mapping Technology, Paper ID:201, Dec. 9th, 2015, Sydney, Australia.
- S. Takai, H. Date, S. Kanai, Y. Niina, K. Oda, and T. Ikeda, "Accurate registration of MMS point clouds of urban areas using trajectory", ISPRS Workshop Laser Scanning 2013, 277-282, Nov. 13th, 2013, Antalya, Turkey.