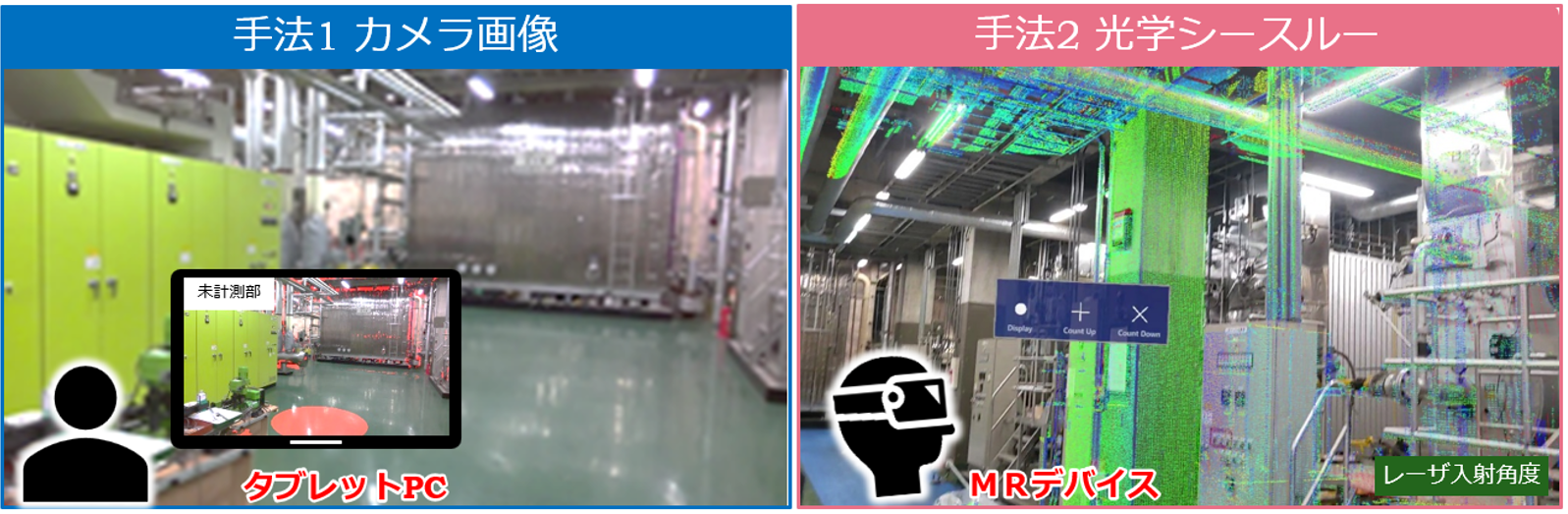
Kenta Ohno, Hiroaki Date, and Satoshi Kanai, Study on Real-Time Point Cloud Superimposition on Camera Image to Assist Environmental Three-Dimensional Laser Scanning, International Journal of Automation Technology, 15(3), 324-333 (2021)
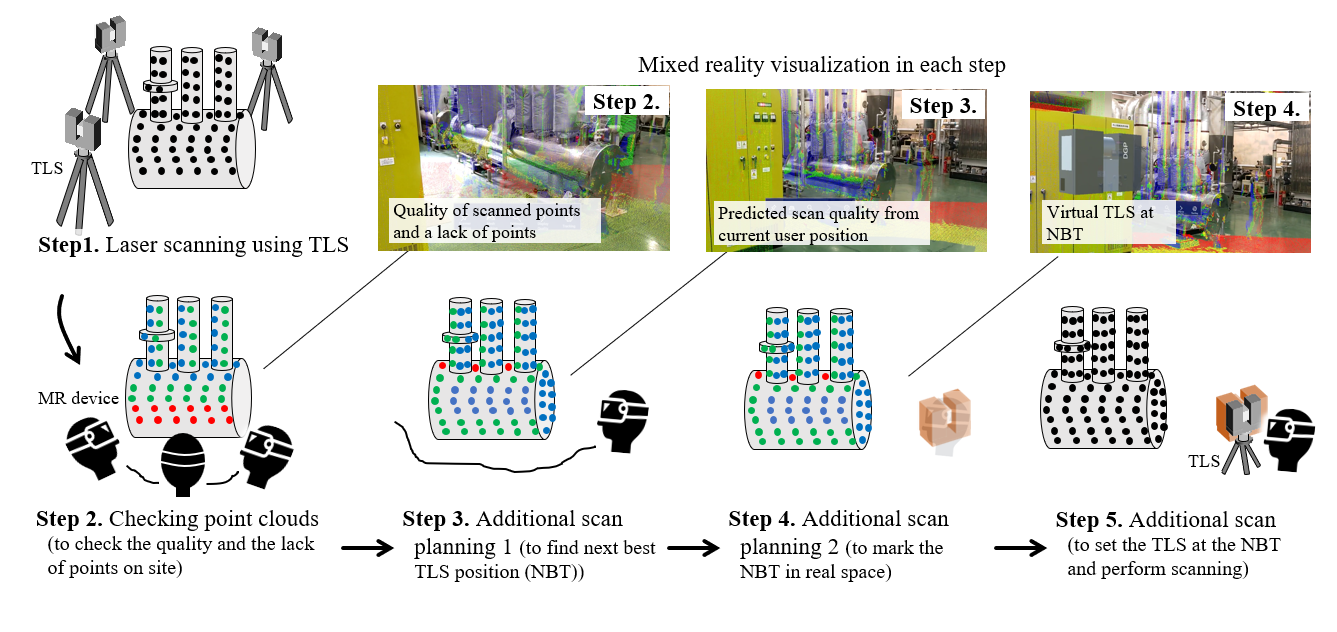
Kenta Ohno, Hiroaki Date, Satoshi Kanai, Mixed reality visualization of point clouds for supporting terrestrial laser scanning, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLIII-B2-2022, 251-258 (2022)