
 サイトマップ
サイトマップ トップページ
トップページ知能ロボットシステム研究室
人間が近寄れない環境で作業するヒューマノイドロボット,難しい手術の前に試行錯誤できる手術シミュレータなど,ロボット技術でより安全で安心な社会をつくる研究をしています.
【研究紹介】
 ヒューマノイドロボット
ヒューマノイドロボット
ヒューマノイドロボットは人間と同じ形をしているので,人間と同じ空間で,人間と同じ動作をできるものとして大変期待されています.それほど遠くない将来,ヒューマノイドロボットが私たちの生活を様々な面でサポートしてくれるでしょう.
そのために重要なことは,ロボットのさまざまな動作を作り出す制御技術です.

現在,人間の代わりにあるいは人間と協力して作業するロボットのための制御技術を研究しています.ヒューマノイドロボット 2 台が協力して荷物を運んだり,衝撃力を利用して大きな力を出す技術を研究しています. 工場やプラントの点検・保守作業のように,人間にとって危険な環境でも,人間でなければ難しい作業があります. そのような場面で,人型であることを活かすロボット技術はとても重要です.
高速ロボティクス
高速性をキーワードとした高速ロボティクスについて研究しており,主に次の3つのカテゴリーに取り組んでいます.
1つ目はスポーツスキルで,従来のロボットが不得意としていたダイナミックな運動を実現する研究です.
スポーツ時に観測されるような投打走捕に関する技能の創出を目指します.
2つ目は動的操りで,多指ハンドを利用して特定作業の自動化・高速化を実現する研究です.
組立・検査の工程や器用なタスクの遂行を目指します.
3つ目は衝撃完全制御で,接触時に生じる撃力を抑制して,高速性と柔軟性を両立する研究です.
バックドライバビリティに着目した新たな衝撃緩和技術の確立を目指します.
【設備・機器紹介】
 ヒューマノイドロボットHRP2
ヒューマノイドロボットHRP2

人間と同じ形・大きさ・重さのロボットを2台運用しています.電源やコンピュータなども内蔵しており,安全のためクレーンが随伴しますが,基本的に外部からの支えなく歩いたり物を持ったりできます.このほかに,上半身型ヒューマノイドロボット(下半身は固定台座),小型ヒューマノイドロボット(全高500mm)なども保有しています.
高速ロボットハンド

従来のロボットハンドより高速に動作することを目標に開発しています.3本指と手首から構成されるシンプルな機構となっていますが,多様な把持形態が可能です.高速なセンサと組み合わせることで,対象の動きに反応してリアルタイムに追従する動作が実現できます.
光学式モーション・キャプチャ・システム
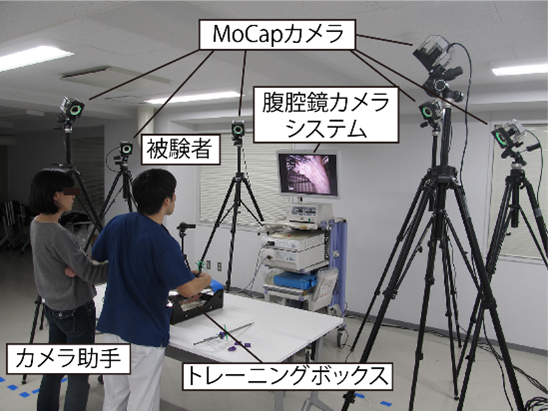
人間の運動を非接触で計測するシステムです.身体中に小さな球状の反射マーカを無数に取り付け,計測対象者を取り囲むように多数の計測カメラ(+赤外線ストロボ)を配置し,マーカの空間的配置を計算することで身体の形状を計測します.この原理を利用して,人間の運動計測だけでなく,道具やロボットの一部(アーム先端など)の運動軌道を追跡することも可能です.
【研究室関連記事】
~ 学生コラム ~
研究によって広がる世界
~ ネットジャーナル ~
人間が直面する危険を減らし、安全性を高める
実用化への期待高まるロボット技術の研究
より詳しく知りたい方はこちらをご覧ください.