
 サイトマップ
サイトマップ トップページ
トップページシステム制御理論研究室
AI/IoT/CPSや自動運転といった先端技術の基盤となるシステム制御理論を研究しています.システム制御理論とは,ダイナミカルシステムを適切に動かすための方法論です.特に,非線形システムや論理的な情報処理を含むハイブリッドシステムの制御について精力的に研究を推進しています.研究室で取り組んでいる応用としては,四輪ロボット,マニピュレータ,自動車のエンジン,ドローン,電力システム,遺伝子ネットワークなど多岐にわたっています.
【研究紹介】
 四輪車両ロボットによる自律的障害物回避
四輪車両ロボットによる自律的障害物回避
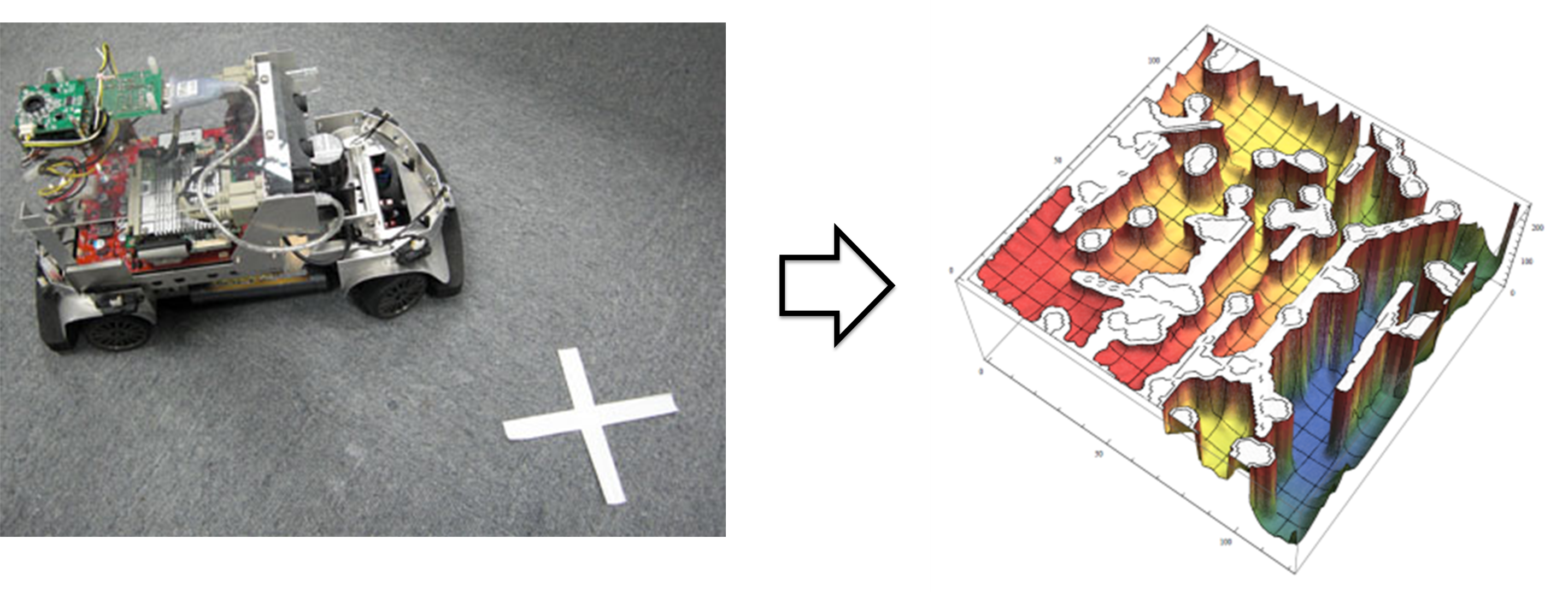
自律的に障害物を回避する四輪車両ロボットの制御を研究しています.障害物と目標地点との位置関係から,空間に仮想的なポテンシャル場(制御リアプノフ関数)を構成します.得られた制御リアプノフ関数から決まるただ1つのルール(フィードバック制御則)を用いると,自律的に障害物を回避しつつ前後に切り返しを行いながら,目標地点に到着することができます.
グラフ上のマルチエージェント監視
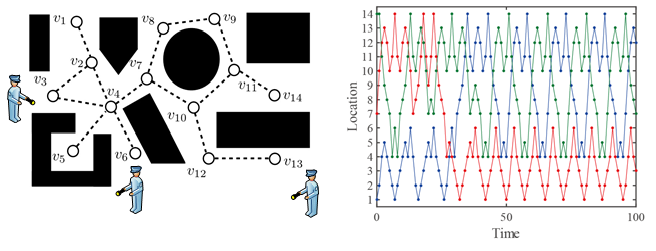
複数のロボットが監視エリア(グラフ)をまんべんなく移動する軌道を求める監視問題を研究しています.監視問題は街のパトロールや災害救助などに利用可能な実用的問題です.これまでに監視問題を混合整数計画問題に帰着される方法を提案しています.また,ロボットのバッテリーに制約がある場合も研究しています.
【設備・機器紹介】
 四輪車両ロボット&ドローン
四輪車両ロボット&ドローン
実機実験用に四輪車両ロボットやドローンなどを保有しています.学生にはデスクトップパソコン,ノートパソコン,ディスプレイ2台,タブレットなどを貸し出しています.論文執筆や計算機シミュレーションを研究室・自宅の両方で実施できる環境を整えています.

【研究室関連記事】
~ 学生コラム ~
制御理論で切り拓く実世界
~ ネットジャーナル ~
数学的アプローチで新しい制御の手法を模索
システムの性質を根本から変革する方程式を求めて
~ ネットジャーナル ~
IoT/CPS時代の次世代システム制御理論の構築
エネルギー問題の解決にも役立つ新しい理論を目指して
より詳しく知りたい方はこちらをご覧ください.