人間より早く、ダイナミックな動きを実現
感覚・運動・処理を完全制御する高速ロボティクス

情報科学研究院
システム情報科学部門 システム融合学分野
知能ロボットシステム研究室・准教授
博士(情報理工学)妹尾 拓
プロフィール
2003年03月、早稲田大学 理工学部卒業。2005年03月、東京大学 大学院情報理工学系研究科 修士課程修了。2008年03月、同博士課程修了。2005年04月〜2008年03月、日本学術振興会 特別研究員(DC1)。2008年04月〜2011年03月 東京大学 大学院情報理工学系研究科 特任研究員。2011年04月〜2015年03月、同特任助教。2015年04月〜2018年03月、同助教。2018年04月〜2020年03月、同講師。2020年04月〜2022年03月、広島大学 大学院先進理工系科学研究科 准教授。2022年04月より北海道大学 大学院情報科学研究院 准教授。
外界とインタラクションしながら
瞬時に反応する高速ロボットの開発
─妹尾先生の専門分野と現在の研究活動はどのようなものですか。
妹尾 私の研究テーマは「高速ロボット」の研究です。高速化に必要なアーキテクチャから、高速化によって生じる課題の解決、従来にない新しい技能をロボットに付加する技術までを想定し、理論・アルゴリズム・デバイス・システム・アプリケーションなど総合的に取り組んでいます。
現在、ロボット開発の分野ではAI(人工知能)や機械学習を使った技術開発が主流ですが、それらはいわゆる情報空間の中で動くもので、主にネット上に存在するさまざまなデータから学習し、予測を立てたり、人間とコミュニケーションしたりします。それに対し、私が手がけているのは実世界で動くもの、身体的な構造を持って外界とインタラクションしながら、高速で動作するロボットです。特に、人間より早く動き、器用でダイナミックな運動能力を持ち、活動範囲の広い汎用性のあるロボットの可能性を追求しています。
ロボットの高速化に関しては、周囲の状況を感知する感覚系、ロボットアームなどを動かす運動系、感覚系が認識した情報をフィードバックして動作に反映させる処理系の3つの側面があり、これら全てを高速化することが必要です。これまでの研究により、感覚系に関しては1000分の1秒ごとに対象を捉える高速ビジョンを開発。運動系では高速アクチュエーションや瞬間的に大きな力を出力するモーターなどを開発し、それらを組み合わせることで高速化と安定化を実現しています。
現在は、①スポーツロボット、②検査・組み立てロボット、③衝突・衝撃の完全制御の3つをテーマとし、新しいコンセプトのもと、動作原理・ロボット技能・アプリケーションなどの開発を行っています。
高速ビジョンで対象を捉え、
瞬時に反応して軌道修正する技術
─3つの研究テーマとその成果について詳しくお聞かせください。

妹尾 スポーツロボットでは、野球の「走攻守投」の動きを高速かつ正確に動作するロボットを開発しています。まず「攻」であるバッティングロボットでは、ボールの動きを高速ビジョンで1000分の1秒ごとに観測し、ボールの三次元位置を認識。ロボットアームも1000分の1秒ごとに軌道修正していきます。人がランダムに投げたボールや、変化球なども打ち返します(解説1)。人間の場合、バッターはピッチャーのモーションやバッテリーの配球などからボールの軌道を予測しますが、このロボットは学習や予測を使わず、瞬時の状況変化にリアルタイムに反応しています。
「投」のスローイングロボットと「守」のキャッチングロボットも動作原理は同様です。高速ビジョンが認識した情報をもとに腕と指の動きを制御するので、的やボールがどこにあっても正確に反応することができます。
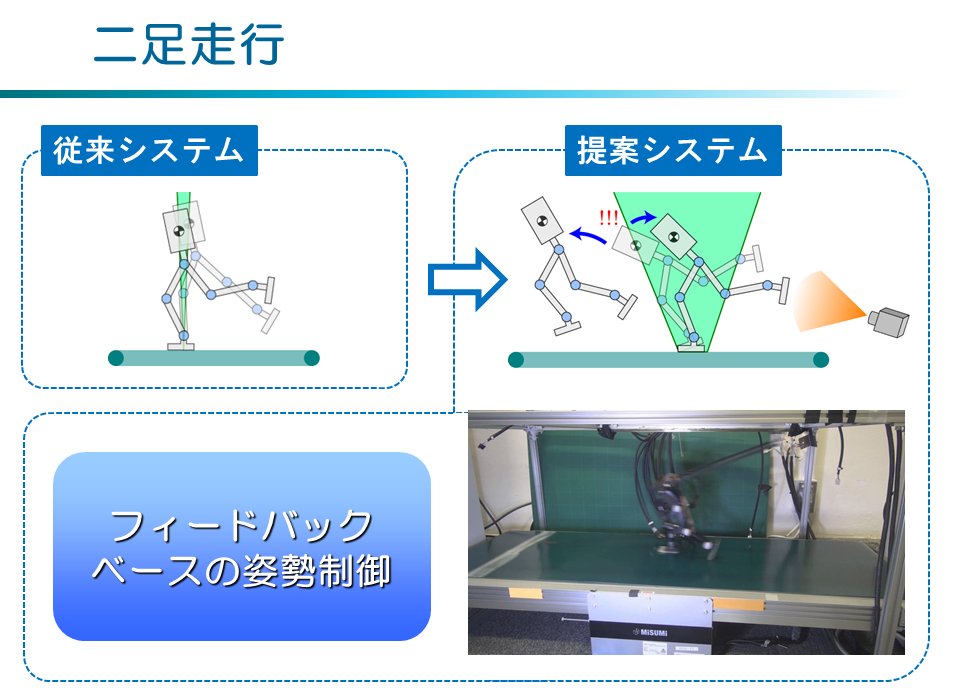
「走」の二足歩行ロボットも動作原理は同様なのですが、従来の二足歩行ロボットにはない高速ビジョンフィードバックを採用しています。従来の二足歩行ロボットは、センサー系で認識するスピードが遅く、かつモーターで動かす部分の動作も遅いため、ロボットの姿勢を安定させられる範囲が狭くなり、その範囲内にロボットが位置するよう事前に軌道生成することが必要になります。本システムでは、環境側に設置した高速ビジョンでロボットの状態・姿勢を高速で認識し、走行姿勢を安定させます。また、瞬間的に大きな力を出力するモータを搭載し、地面を蹴る力や空中に浮いている足を素早く前に踏み出して着地の姿勢に備えるなどの動作が可能です。このため、物にぶつかるなどの外乱や、凸凹路面であっても瞬時に姿勢を立て直すことができます(解説2)
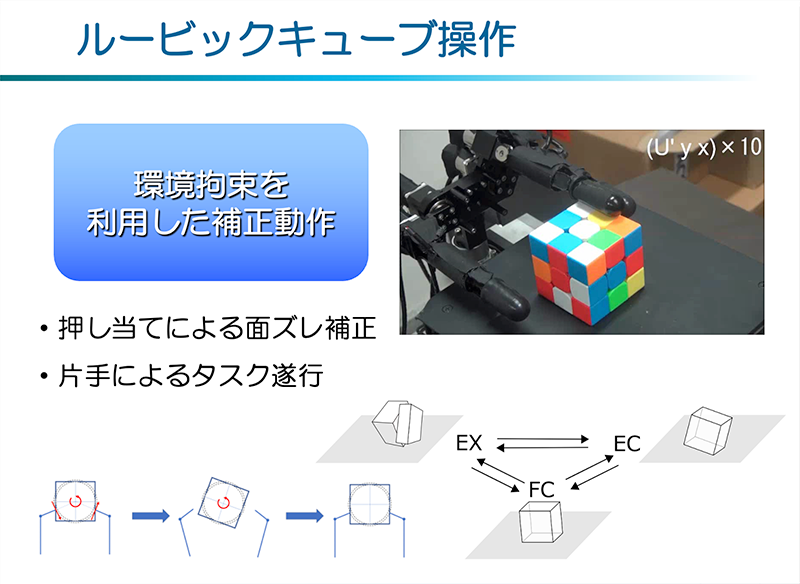
検査・組み立てロボットは、「環境拘束」を利用したシステムです。例えば、ロボット(片手)の3本の指でルービックキューブを操作すると、どうしても面にズレが生じます。ズレたままでは次の操作ができないので、いったん机にキューブを押し当てて面を平らに整えます(解説3)。また、ターミナル端子を回して外す作業の例では、ロボットハンドの指先が端子に触れた状態や、触れた指が端子を回す状況を高速ビジョンで認識し、回転状況を確認しながら高速で回して外すことができます(解説4)
ロボットの動作が速くなればなるほど、対象との接触の衝撃が大きくなります。衝突・衝撃の完全制御はこれらの課題に対応するもので、接触の瞬間の衝撃を抑制し、高速性と柔軟性を両立させる技術です。特に塑性変形制御に着目し、押し返す力を加えずに衝撃を吸収する仕組みを考案しています(解説5)。
社会実装への可能性を高めるため
さらなる進化と発展を目指して
─今後の研究計画はどのようなものですか。
妹尾 これまでの研究は、ノイズや外乱に瞬時に反応して動く仕組みとしては非常にうまくいっていると思います。作業スピードも人間より早いスピードを実現しています。現在は、瞬間的に状況を理解し、高速で反応するという反射的な動きを追求しており、学習や予測といったAI分野での技術とは異なるアプローチです。しかし、将来的にはさらに高次の知識的判断ができるロボットが求められると考えられ、AIと連携した自律的なロボットの開発へと進む可能性があります。AIと融合するためのアーキテクチャの創出も含め、今後の研究計画として視野に入れていこうと思います。
ロボット開発は、現在盛んに研究が行われている分野で、ハード・ソフト両面からさまざまにアプローチされています。本研究室でも感覚・運動・処理の3つの側面で、アーキテクチャから理論、アルゴリズム、デバイス、アプリケーションなど総合的な観点で開発を行っています。製造業や農業、医療など、多様な分野での社会実装も期待され、ロボット開発に興味がある学生さんには多くの可能性が広がっていると思います。
学生時代は、自分のやりたいことがはっきり見えていないこともあり、「研究」に対する意識を強く持てない人もいるのではないかと思います。与えられた課題に追われ、興味あるテーマを探究することができない人もいるでしょう。しかし、自分なりのテーマを見つけ、オリジナリティを付け加えながら自分の研究として形作っていくプロセスは非常に大切です。学生時代にしかできない経験もあるので、臆することなく、積極的に研究に取り組んでほしいと思います。
解説
解説1:ハイブリッド軌道生成によるバッティングロボット
人間がランダムな位置やタイミングで投げたボールでも打ち返すシステム。高速ビジョンで1000分の1秒ごとにボールの三次元位置を計算し、その情報に合わせてロボットアームを1000分の1秒ごとに軌道修正してボールを打つ。ストライクゾーンから外れるボールはスイングせず見逃す設定になっている。

解説2:フィードバックベースの姿勢制御
高速ビジュアルフィードバックを用いた2足歩行ロボット。自重を支える力に加えて、地面を蹴る力も必要であるため、軽量かつパワーのあるアクチュエーターが求められる。本研究では、ロボットハンドの指モジュールをベースに、地面を蹴る高負荷状態での高トルク出力と、滞空状態から着地姿勢へ戻る低負荷状態での高速動作を実現している。さらに環境側に設置した高速ビジョンでロボットの状態・姿勢を認識し、走行姿勢を安定に保つことを可能にしている。
解説3:ルービックキューブ操作
ルービックキューブを高速ビジョンで観察し、ロボットハンド(3本指)が必要に応じて机の表面に押し当て、面のズレを修正する。
解説4:探索動作によるキャリブレーション補正
ロボットハンド(3本指)で対象(端子)に触れ、触れた瞬間のネジの動きを上部のカメラで感知し、ロボットハンドと対象との距離や摩擦を認識して2本の指でネジを回す。

解説5:塑性変形制御
外力に起因する手先の位置姿勢変化を“ロボットの変形”と捉え、多関節マニピュレータの受動的な挙動を生成する変形制御を提案。受動的な制御手法でありながらも力や位置を間接的に調整しながら多様な応答特性を実現した。
